
Noggrannhet och repeterbarhet för en Robotarm
Projektbeskrivning
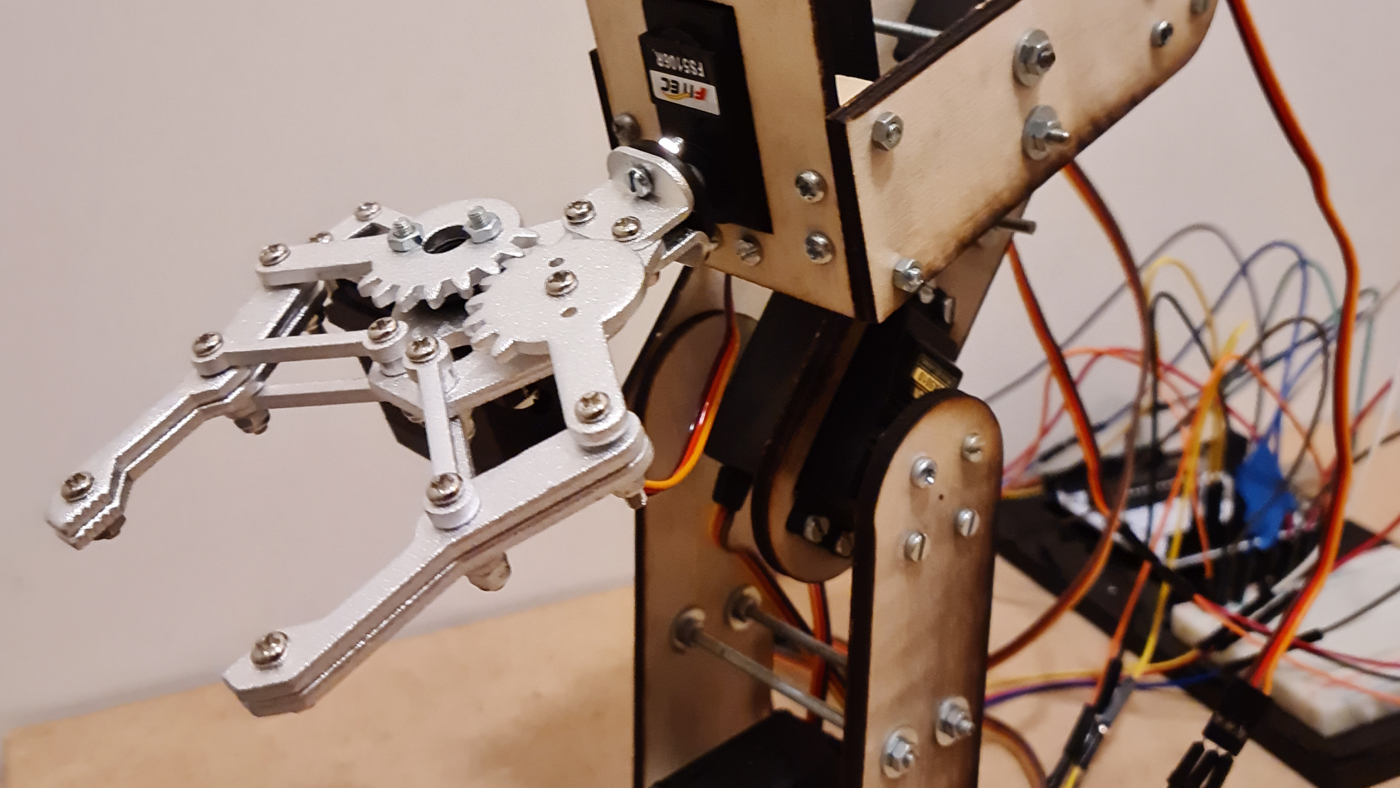
Syftet med detta projekt var att skapa en modell av en robotarm med 4 frihetsgrader och en klo för att kunna flytta ett objekt till ett förbestämt område. Denna avhandling har undersökt robotens noggrannhet genom att upprepa en förbestämd rörelse och mäta felet. Felet bestämdes genom att flytta ett objekt till en förbestämd plats och mäta objektets position i förhållande till målet.
Den färdigkonstruerade roboten har en norggrannhet på 2.506 mm till 0.922 mm och en repeterbarhet på 5.995 mm till 4.059 mm beroende på hur fort roboten rör sig.
Poster
Accuracy and Repeatability of a Robotic Arm poster (Eng) (pdf 2,1 MB)
Rapport
Accuracy and Repeatability of a Robotic Arm report (Eng) (pdf 744 kB)
MF 133X, Grupp 22
Carl-Victor Lidholm
Victor Runnquist