
Självbalanserande Monowheel
Balansering av ett Monowheel med hjälp av en PID regulator
Projektbeskrivning
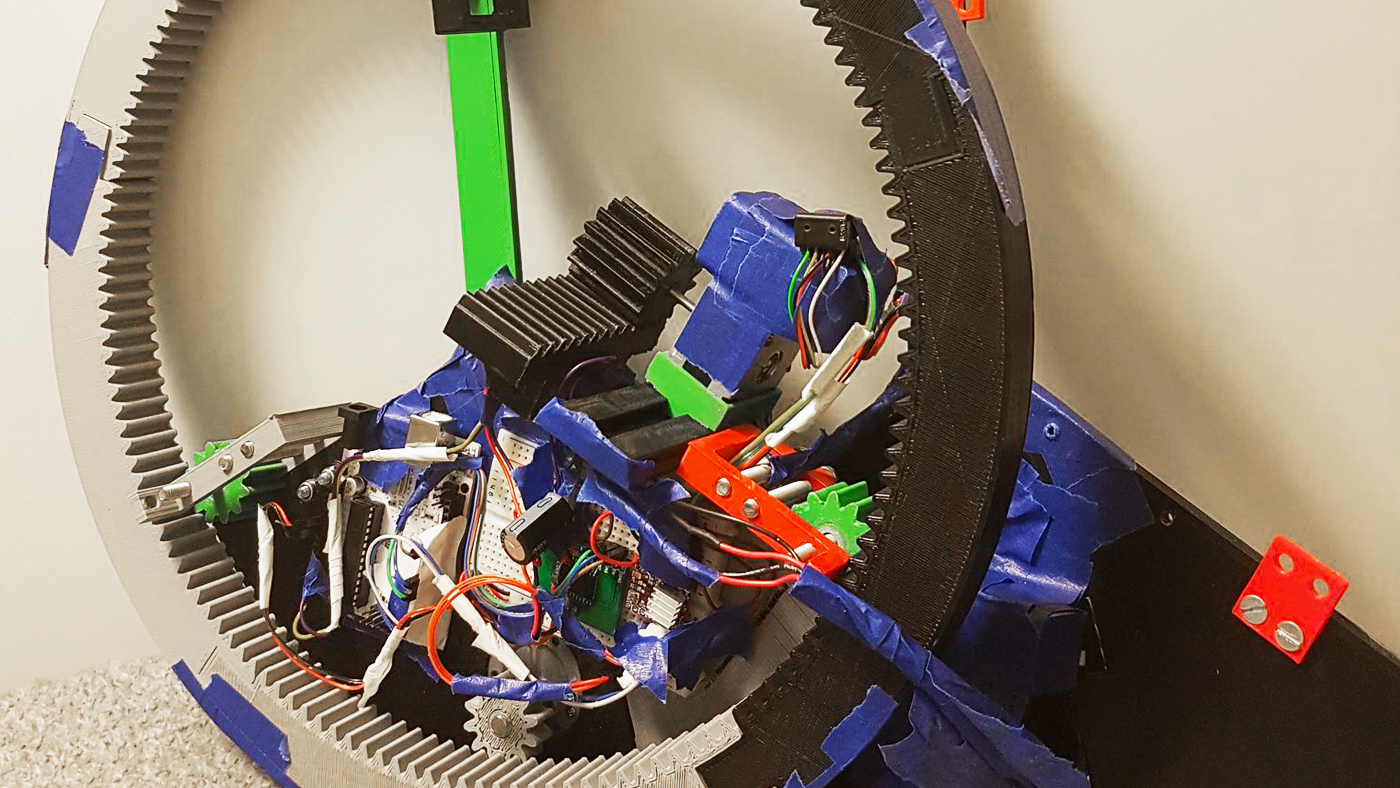
Detta kandidatexamensarbete har målet att skapa ett självbalanserande hjul med hjälp av en PID kontroller tillsammans med en acceleromter vars utsignal filtreras med ett kalman filter. En DC motor driver hjulet frammåt medan en stepper motor med ett batteripack fastsatt är den rörliga vikten som balanserar konstruktionen. PID metoden lyckades balansera upp till 7 sekunder vilket är en marginell ökning jämfört med upp till 4 sekunder helt utan aktiv balansering.
Poster
Balancing a Monowheel with a PID controller poster (Eng) (pdf 855 kB)
Rapport
Balancing a Monowheel with a PID controller report (Eng) (pdf 1,6 MB)
MF 133X, Grupp 31
Fritiof Andersen Ekvall
Nils Winnerholt