
Balanserande fyrbent robot
Design och stabilitet för en balanserande fyrbent robot
Projektbeskrivning
I dagsläget ser vi en snabb expansion i användningen av robotar för att utföra alltmer avancerade uppgifter. På grund av detta var målet med detta projekt att utveckla en fyrbent robot med en enkel implementation av självbalansering.
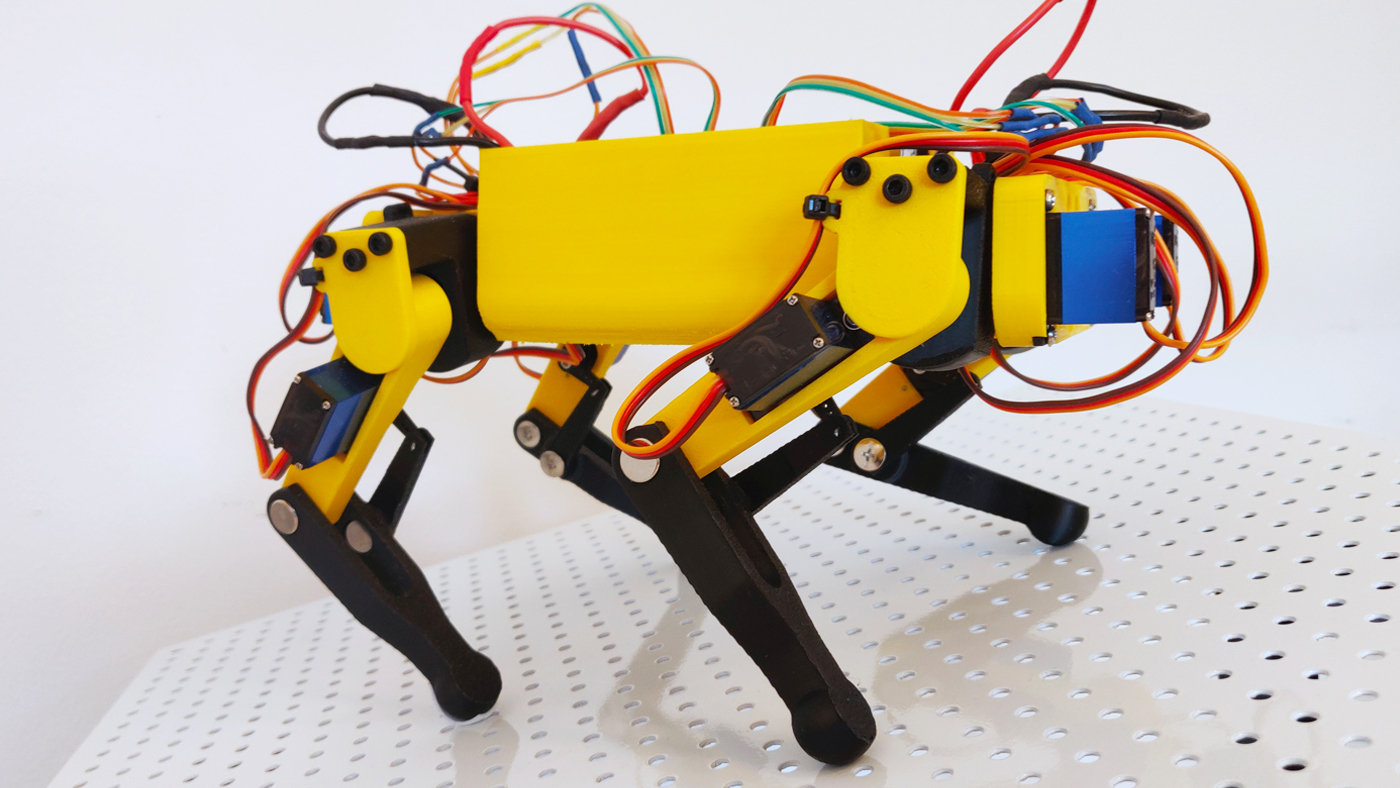
Den framtagna prototypen är en robot av hundstil med bakåtgående knän. Styrenheten är en Arduino UNO mikrokontroller. Med information från ett gyroskop styr denna roboten med hjälp av dess servomorer. Prototypen är kapabel att hålla balansen då den står på lutande underlag. Rörelsen är baserad på en kinematisk modell av bengeometrin och förutsätter en plan markyta.
Poster
Design and Stability of a Quadruped Robot Final prototype poster (Eng) (pdf 2,9 MB)
Rapport
Design and Stability of a Quadruped Robot Final prototype report (Eng) (pdf 1,1 MB)
MF 133X, Grupp 15
Algot Lindestam
David Lorang