
PlaCo
Roboten som samlar upp plast i vattnet
Projektbeskrivning
Globalt sett är världens hav en viktig resurs för alla levande organismer men inte minst för människan. Trots detta fortsätter vi att, år efter år, försumma återvinningen av vårt avfall vilket resulterar i att skräp i stället hamnar i haven. Majoriteten av de sopor som hamnar där är resultatet av förbrukade engångsprodukter i plast. Genom sönderfall och erosion skapas allt mindre och mindre bitar av plast. Detta resulterar i att så kallade mikro- och nanoplaster skapas. De är mindre än 5 mm i bredd och om deras påverkan på det marina djurlivet och den marina miljön vet vi mycket lite om. För att minska kunskapsluckorna och för att få en bättre förståelse fö deras påverkan har nu därför PlaCo konstruerats.
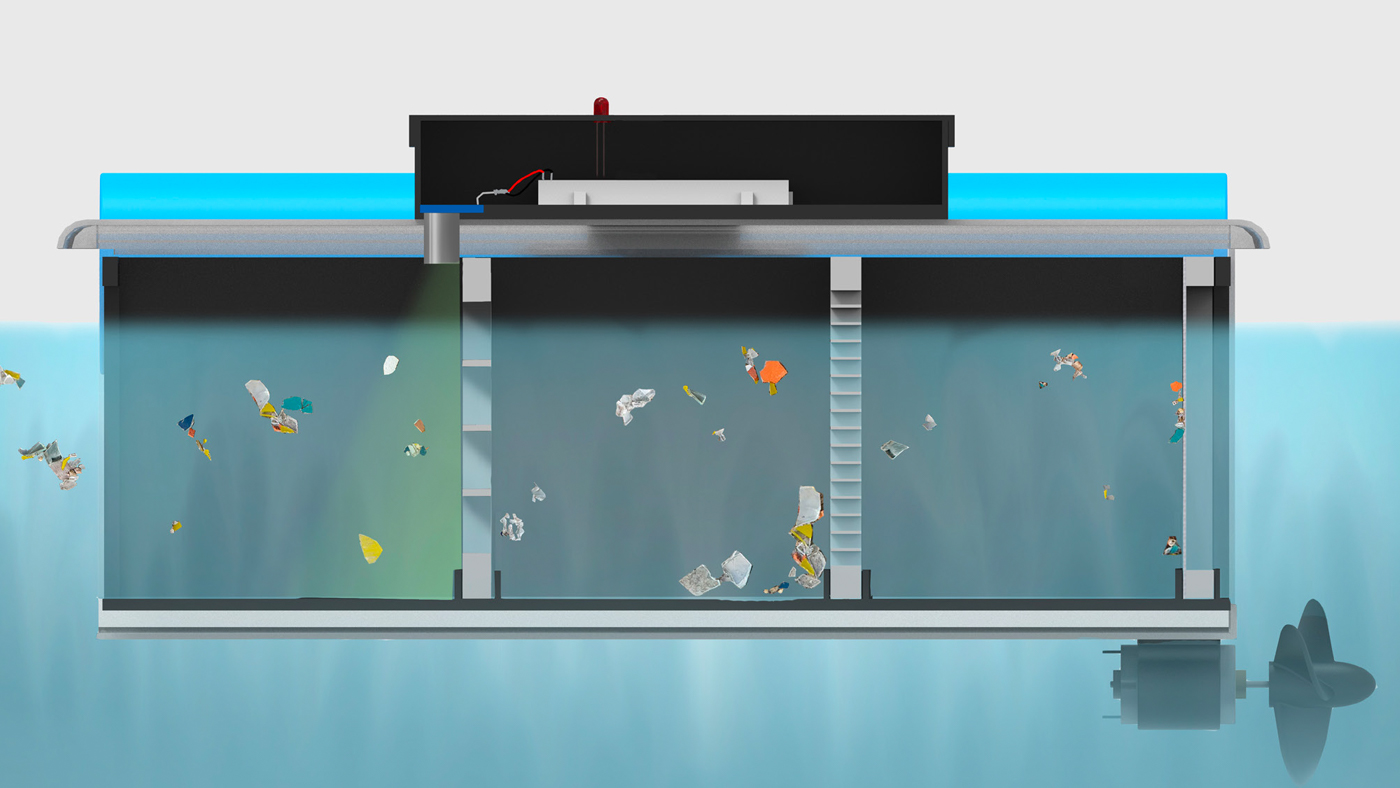
Med hjälp av tre sorters filter kan PlaCo samla upp marint skräp, så som plast, i vattnet där den arbetar. Filtrens finhet varierar, där det första är mycket grovt medan det sista är fint nog att klara av att samla upp mikroplaster. När PlaCo sedan töms kan mikroplasterna undersökas och dokumenteras. När en tömning behöver göras indikeras detta för användaren med hjälp utav en LED. Roboten är försedd med en sensor som läser av hur fulla filtren är. För att driva PlaCo framåt och för att underlätta filtreringsprocessen är den också försedd med två 6 V DC-motorer. Allt detta styrs med hjälp av mikrokontrollern Arduino Uno.
För att uppnå bästa tänkbara funktion hos roboten undersöktes två olika sensortyper, en IR-sensor och en ultraljudssensor. Det visade sig att ultraljudssensorn var betydligt mer pålitlig än IR-sensorn och därför valde man att använda denna. Det var även av intresse att ta reda på hur mycket vatten PlaCo kunde rena per sekund. Tyvärr skulle det visa sig att de valda motorerna inte var kraftfulla nog att driva PlaCo i vattnet. Det är därför något som behöver åtgärdas i en framtida version av PlaCo.
Poster
PlaCo poster (Eng) (pdf 3,4 MB)
Rapport
PlaCo report (Eng) (pdf 1,2 MB)
MF 133X, Grupp 28
Annie Persson
Johanna Bergsten