
Multidirektionell Fyrbent Robot
Projektbeskrivning
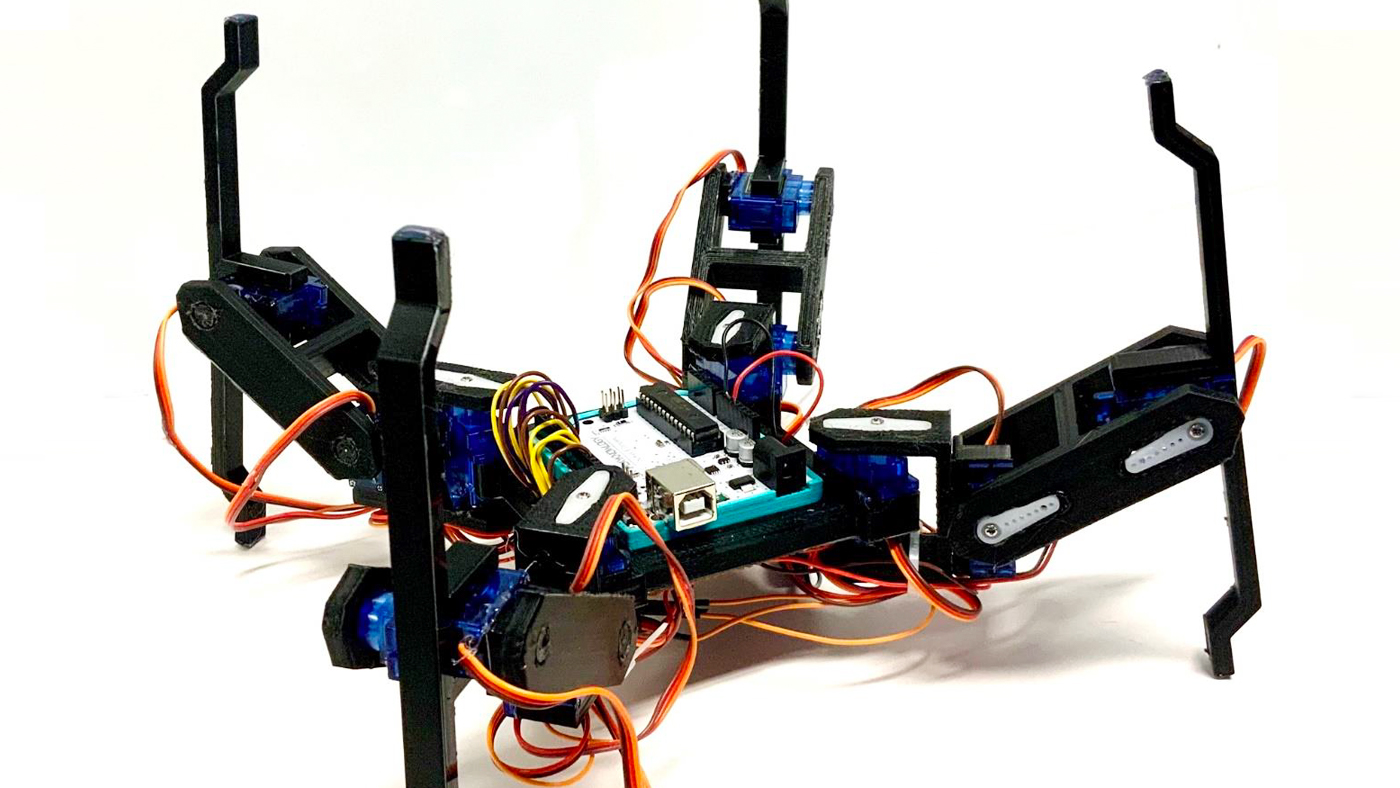
Det här projektet gick ut på att skapa en krypande fyrbent robot som kan gå i alla riktningar utan att rotera runt sitt eget centrum. Det finns idag redan ett stort antal olika fyrbenta robotar, men få kan gå i alla riktningar. Därav så beskriver den här rapporten framtagningen och designprocessen för en sådan robot. Undersökning av fyrbenta robotar visade att en mikrokontroller är nödvändig för att kontrollera roboten och servomotorer bör användas för att driva lederna. Förstudeierna gav även basen för de matematiska modellerna som används för rörelserna, samt vetskapen om ett flertal olika typer av gångstilar, allt från statiskt stabil till dynamiskt stabil.
I det här projektet beskrivs de matematiska modellerna som används för att definiera rörelsen i alla riktningar och hur dessa appliceras i programmeringen av roboten. Resultatet blev en robot som kan gå i alla riktningar utan att rotera runt sitt centrum, både normalt och uppochner. Detta ger möjligheten att byta rörelse riktning utan att behöva stanna eller vända sig, samt möjliggör även riktnings korrektioner utan att kräva extra steg.
Poster
Omnidirectional Quadruped Robot poster (Eng) (pdf 592 kB)
Rapport
Omnidirectional Quadruped Robot report (Eng) (pdf 1,3 MB)
MF 133X, Grupp 17
Samuel Stenow
Simon Lindenfors