
Exo-kontrollerad biomimetisk robothand
En designlösning för styrning av en robothand med ett exoskelett
Projektbeskrivning
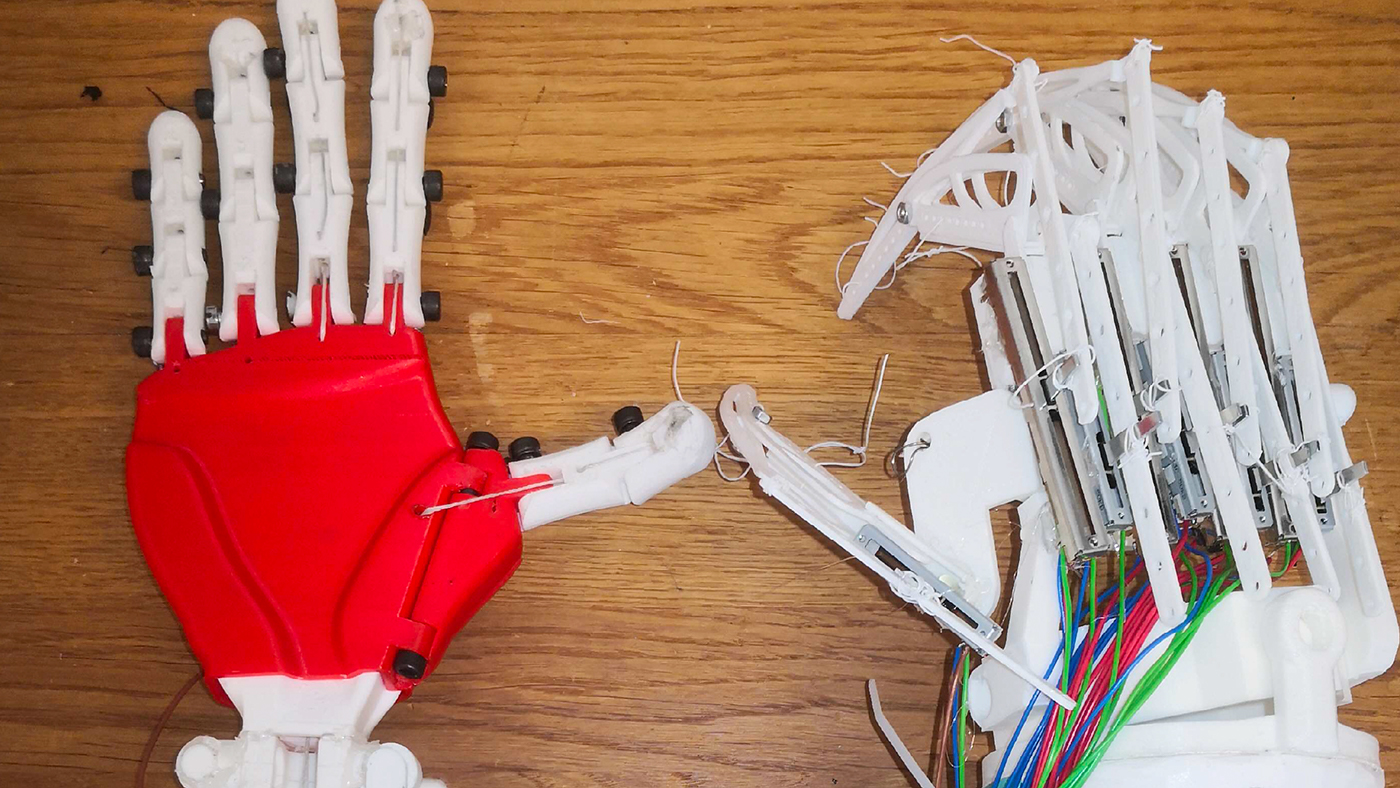
Robotarmar och händer finns många former och storlekar, de kan vara för allmänna ändamål eller uppgiftsspecifika. De kan programmeras av en dator eller styras av en mänsklig operatör. Det finns en viss typ av robothänder som försöker efterlikna formen, rörelsen och funktionen hos den mänskliga handen, och brukar kallas biomimetisk robotik. Detta projekt utforskar interaktionen mellan människa och robot genom att skapa en antropomorf robothand med tillhörande exoskelett. Handen, som består av en 3D-printad kropp och fingrar, är ansluten till en underarm där servormotorerna som styr fingrarna sitter. Exoskelettet ansluts till operatörens hand vilket möjliggör spårning av fingrarnas rörelse genom ett antal potentiometrar. Detta tillåter operatören att intuitivt styra en robothand med en viss grad av precision.
Vi valde att besvara ett antal forskningsfrågor med avseende på form och funktion av en biomimetisk hand och exoskelettet. Under projektets gång påträffades en mängd problem såsom budgetproblem som resulterade i att bara hälften av fingrarna kan kontrolleras. Trots detta fick vi bra resultat från de fungerande fingrarna och våra forskningsfrågor kunde besvaras.
Poster
Exo-Controlled Biomimetic Robotic Hand poster (Eng) (pdf 1017 kB)
Rapport
Exo-Controlled Biomimetic Robotic Hand report (Eng) (pdf 2,1 MB)
MF 133X, Grupp 26
Philip Linder-Aronson
Simon Stenberg