
Multifunktions robotarm
En MATLAB-styrd robot
Projektbeskrivning
Dagens samhälle står inför en stor ökning av automatisering och smarta produkter. Allt från kaffemaskiner till kyl och frys innehåller någon form av elektronik och inbäddade system.
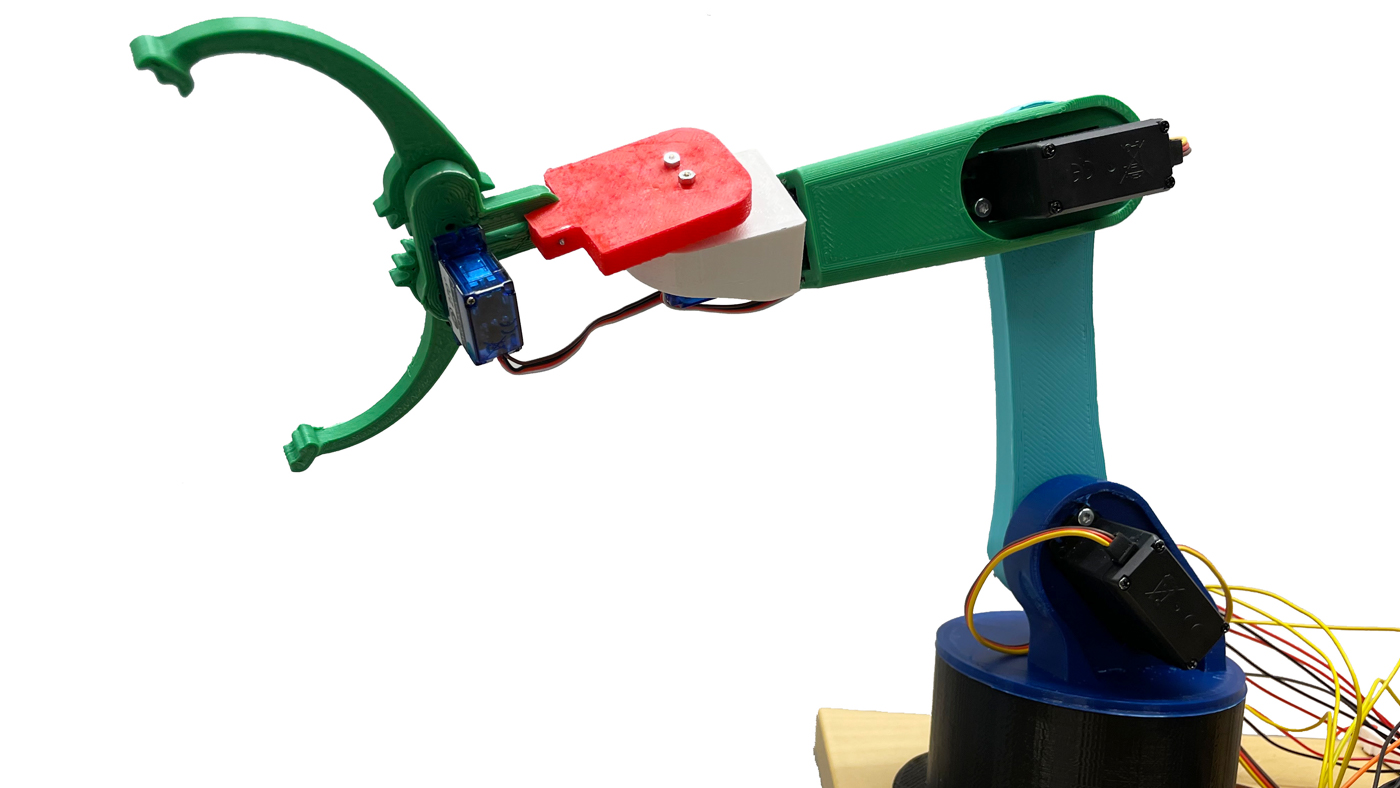
Det huvudsakliga syftet med detta kanditatexamensarbete var att gräva djupare i hur dessa automatiserade produkter kan kontrolleras och mer specifikt i detta fall, en robotarm. Projektet handlade om att konstruera en robotarm som kunde styras och kontrolleras genom tre olika metoder i programmet MATLAB. Dessa tre har vi valt att kalla manuell kontroll, numerisk kontroll och neuralt nätverksbaserad kontroll. Prototypen tillverkades genom att montera sex servomotorer på 3D-utskrivna delar. Armen bestod av tre huvuddelar, en bas, en arm och en gripklo. Systemet styrdes av en Arduino mikrokontroll ansluten till en dator.
Resultaten visar att the manuella kontrollmetoden var enkel att implementera, snabb samt var tillförlitlig. Den gav precis styrning av alla vinklar för varje servomotor, vilket också innebar att den gav god styrning av varje frihetsgrad. Den numeriska metoden, mer bestämt Newton Raphson’s metod, vidgade möjligheterna att kontrollera armen men var långsammare. Den tredje och sista lösningen var att använda ett neuralt nätverk, fuzzy logic. Detta visade sig vara ett kraftfullt sätt att styra roboten med låg latens. Det neurala nätverket visade sig dock vara opålitligt, men metoden visade stor potential för vidare utveckling och kan då prestera mycket bättre än de andra två metoderna. Slutsatsen var att det neurala nätverket var den generellt bästa metoden för att kontrollera och manövrera robotarmen via programmeringsprogrammet MATLAB.
Poster
Multipurpose Robot Arm poster (Eng) (pdf 1,2 MB)
Rapport
Multipurpose Robot Arm report (Eng) (pdf 1,3 MB)
MF 133X, Grupp 16
Alexander Aronsson
Fahim Pirmohamed