
Omnidirektionell robot
Självkörande kartläggningsrobot
Projektbeskrivning
Robotar är något som används mer och mer i dagens moderna samhälle. Dessa robotar behöver vara mobila och ha en god uppfattning om miljön de befinner sig i. Detta kandidatexamensarbete inom mekatronik ska undersöka hur en mobil robot kan byggas, och hur den kan kartlägga miljön den befinner sig i.
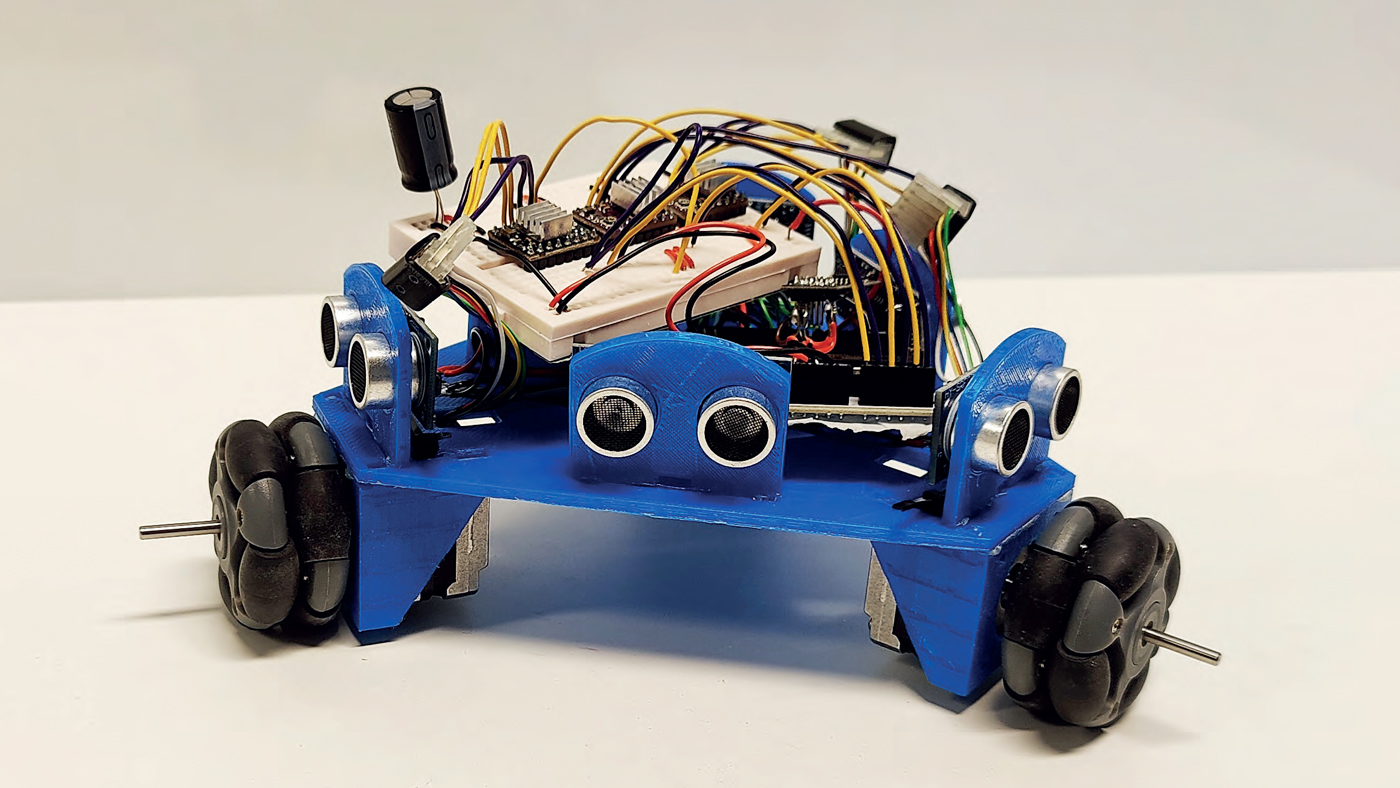
Roboten som konstruerades hade tre omnihjul för att kunna röra sig fritt längs markplanet och stegmotorer för precis drift. Ultraljudsensorer placerades runt om roboten för att ge den en uppfattning av omgivningen. Hjärnan i roboten var en Arduino UNO som med hjälp av en ESP-01 kommunicerade över Wi-Fi till en server. Servern tog emot sensordata från roboten och ritade upp det som en karta i en webbläsare.
Det utfördes tester för att utvärdera de olika delsystemen. Driften på roboten fungerade utmärkt med god precision efter några iterationer. Ultraljudsensorerna hade också god precision och kommunikationen mellan roboten och servern fungerade mycket bra. De olika delsystemen kombinerades för att ge roboten självkörning. Roboten kunde navigera själv och undvika hinder. Trots att kartan fungerade ur ett tekniskt perspektiv så var den svårtydd och kunde förbättrats.
Poster
Omnidirectional Robot poster (Eng) (pdf 5,4 MB)
Rapport
Omnidirectional Robot report (Eng) (pdf 8,4 MB)
MF 133X, Grupp 11
Axel Hedvall
Filip Rydén